
aQuatonomous is Queen's University's student-run autonomous surface vehicle (ASV) team, competing in the annual RoboBoat challenge hosted by RoboNation. As Mechanical Team Lead, I own the full mechanical lifecycle — from concept and CAD through fabrication and on-water testing.
The vehicle must autonomously navigate a course of tasks including docking, path following, and object avoidance, requiring a hull that is both hydrodynamically efficient and structurally rigid enough to house sensitive electronics and propulsion hardware.
The hulls were designed parametrically in SolidWorks, optimized for low drag and stability at competition speeds. Rather than machining traditional foam plugs, I developed a process using FDM-printed mold segments that bolt together into a full-scale mold surface.
The FDM-to-fiberglass workflow cut mold lead time by roughly 60% compared to traditional foam-and-filler approaches, and allowed rapid design iteration between competition cycles.
A custom aluminum crossbeam connects the two hulls, providing a mounting platform for the electronics enclosure, sensor mast, and propulsion pods. Every joint was designed to be disassembled for transport and reassembled in under 20 minutes.
Beyond hands-on fabrication, the role involves coordinating a team of mechanical sub-leads, managing the build schedule, and liaising with electrical and software teams to ensure mechanical interfaces are defined and frozen before integration sprints.

FDM mold segments
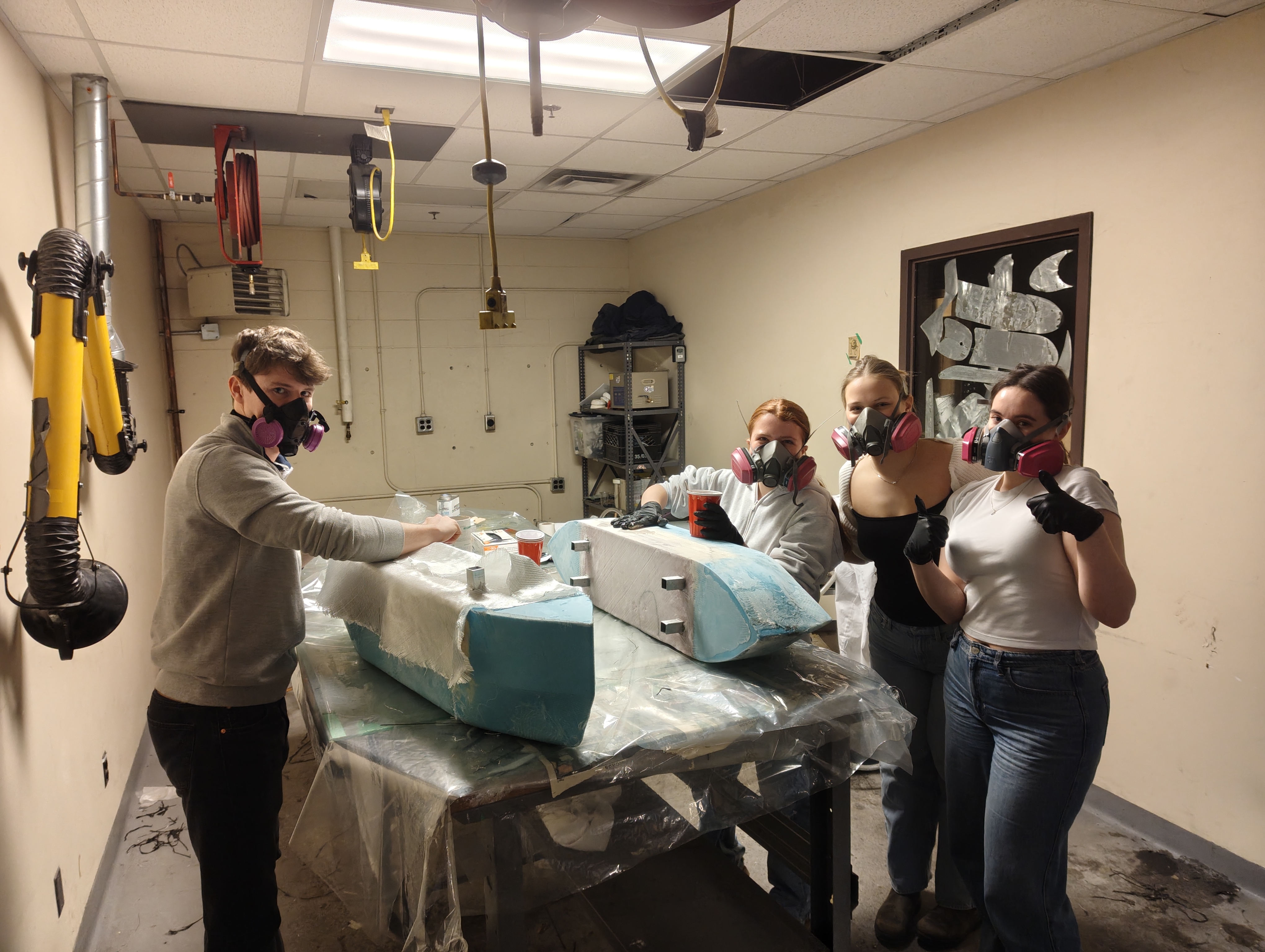
Fiberglass layup

Hull assembly

Water testing